Witam!
O NXT marzyłem już od dłuższego czasu, jednak wciąż coś mnie powstrzymywało… W tradycyjnych sklepach NXT to wydatek rzędu 1400 zł (i więcej; widziałem nieraz po 1600zł). Jednak wraz z pojawieniem się w bazarze informacji od TT, że można u niego zakupić znacznie taniej zestaw (1050 zł dla członków Lugpolu), przemogłem się i napisałem do sprzedawcy, który nie robił żadnych problemów.
Paczkę zamówiłem wieczorem w poniedziałek, kurier przyszedł zaś w środę – 2 dni czekania na zamówiony zestaw to niewiele.
Od tego czasu wciąż męczę się z recenzją NXT – być może całość szybciej by poszła, gdyby nie filmiki (które mają jednak tą zaletę, że osoby nic nie wiedzące o NXT będą mogły zobaczyć, jak się to programuje i jak to działa po zbudowaniu).
8547 to wyjątkowy zestaw. Bardzo dużo osób narzeka na fakt, że w dzisiejszych czasach mało setów posiada modele alternatywne – tu oprócz instrukcji 4 różnych modeli, na stronie Mindstorm znajdziemy ponad 10 alternatyw, których jednak nie przedstawiłem w recenzji (do pobrania są zarówno instrukcje, jak również gotowe programy). No i nie zapominajmy o najważniejszym – możliwości oprogramowania czujników!
Pewnie całość można by lepiej wykonać, ale nie zapominajmy, że modele z 8547 są raczej duże i ciężkie (zwłaszcza recenzowany Alpha Rex, o którym będzie jeszcze mowa) – a jak wiadomo, nie jest rzeczą prostą fotografowanie dużych obiektów. Najprostszy model tworzy się około 30 minut (na spokojnie, bo chyba nikomu nie zależy na tym, aby w ogólnym pośpiechu uszkodzić np. kabel; dotyczy to zbudowania i zaprogramowania robota).
Kończąc ględzenie, zapraszam do lektury (mam nadzieję, że komuś się przyda; z tego co sprawdzałem, filmy wykonane do tej recenzji zajmują łącznie 1 h 40 min – mój rekord w tworzeniu wideo-recenzji :D ). Zapewne osoby, które miały już styczność z tym zestawem będą w stanie powiedzieć coś więcej ode mnie; mam jednak nadzieję, że jeśli ktoś rozważa zakup zestawu i/lub nigdy nie programował w tym specyficznym języku (który ma kilka alternatyw) z zaciekawieniem spojrzy na powyższy artykuł – bo w sumie, typowe recenzje skupiają się na pokazaniu modelu + modeli alternatywnych, a artykuły/poradniki mają za zadanie czegoś nauczyć – recenzja ta jest zatem czymś więcej, niż recenzją, ale mniej, niż poradnikiem.
8547

Dane Techniczne:
Seria: Mindstorms
Rok produkcji: 2009
Liczba klocków: 619
Liczba figurek: 0
Cena: ok. 1200 zł – Allegro, 1400 zł – S@H; w zwykłych sklepach jeszcze drożej
SPIS CZĘŚCI
PEERON
BRICKLINK
BRICKSET
Instrukcje (modele główne)
Instrukcje (modele dodatkowe)
Specyfikacja techniczna:
– 32-bitowy mikrokontroler ARM7
– 256 kilobajtów pamięci FLASH, 64 kilobajty pamięci RAM
– bezprzewodowe połączenie Bluetooth, port USB Full Speed (12Mbit/s)
– 4 porty wejściowe i 4 wyjściowe, połączenie cyfrowe kablem 6-żyłowym
– graficzny wyświetlacz LCD 100×64 piksele
– głośnik (jakość 8kHz), kanał dźwiękowy: 8-bitowa rozdzielczość, częstotliwość próbkowania: 2-16 kHz
– zasilanie: 6 baterii AA (paluszki)
Standardowe połączenia sensorów i silników:
Porty wejściowe:
port 1: czujnik dotyku
port 2: czujnik dotyku
port 3: czujnik koloru
port 4: czujnik ultradźwiękowy
porty wyjściowe:
port A: motor specjalnego przeznaczenia
port B: motor do poruszania
port C: motor do poruszania
Wymagania systemowe:
– system: Windows xp (sp2 i wyżej)/Vista (sp1 lub nowszy)/win 7 lub Apple MacOS X wersja 10.4 lub 10.5
– procesor: Intel Pentium (lub kompatybilny), minimum 800 MHz (win xp), 1 GHz (Vista); w przypadku Macintosha: procesor PowerPC G3, G4 lub G5, min 600 MHz
– napęd: CD-ROM (DVD-ROM dla MacOS)
– RAM: 512 MB (minimum)
– Wolne miejsce na dysku: 700 MB (minimum)
– grafika: karta graficzna i monitor XGA (1024-768)
– USB: przynajmniej 1 wolny port
* adapter Bluetooth (opcjonalnie)
Pudełko






Pudełko jest bardzo duże – na filmie moje ręce wyglądają, jakbym był jakimś dzieckiem czy coś :D
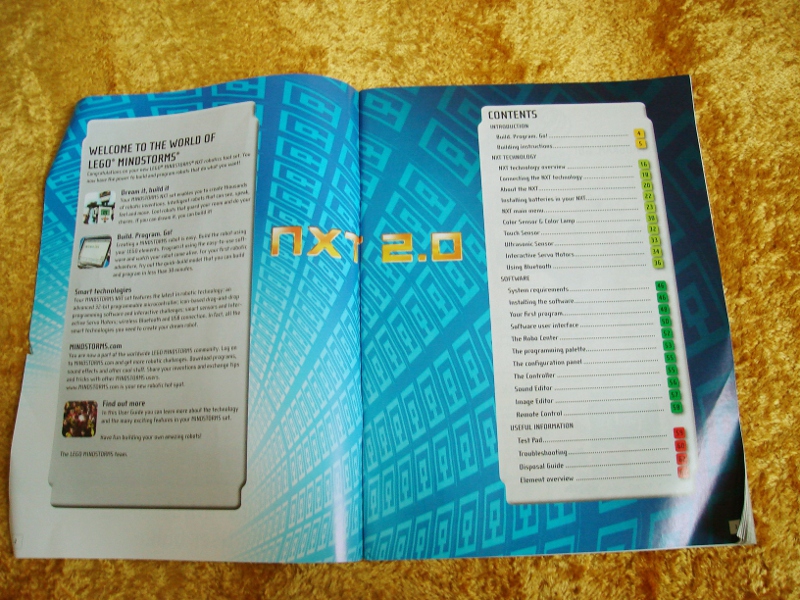
Przód pudełka:
Na samej górze widnieje logo LEGO Mindstorms. Nieco poniżej, z prawej strony widzimy napis ze złotych liter „NXT 2.0”. Na pierwszym planie znajdziemy główny model tego zestawu – samego Alpha Rexa 2.0, stojącego w majestatycznej pozie, i celującego swoim kolorowym laserem w odbiorcę. Tło, na którym znajdziemy naszego robota, wygląda tak, jakby przybył on z innego wymiaru. Opisany jest każdy czujnik – ultradźwiękowy/dotyku/koloru, serwomotory oraz NXT – magiczna kostka, bez której nic by nie ożyło.
Po prawej stronie widzimy modele alternatywne, o różnych poziomach trudności: Shooterbota, Robogatora czy Color Sortera. Po lewej zaś mamy informację o tym, że zestaw kierowany jest docelowo dla dzieci powyżej 10 roku życia, numer zestawu, łączna liczba elementów, możliwość instalacji oprogramowania na Windows/Macintosh, Bluetooth oraz USB (do komunikacji z komputerem).
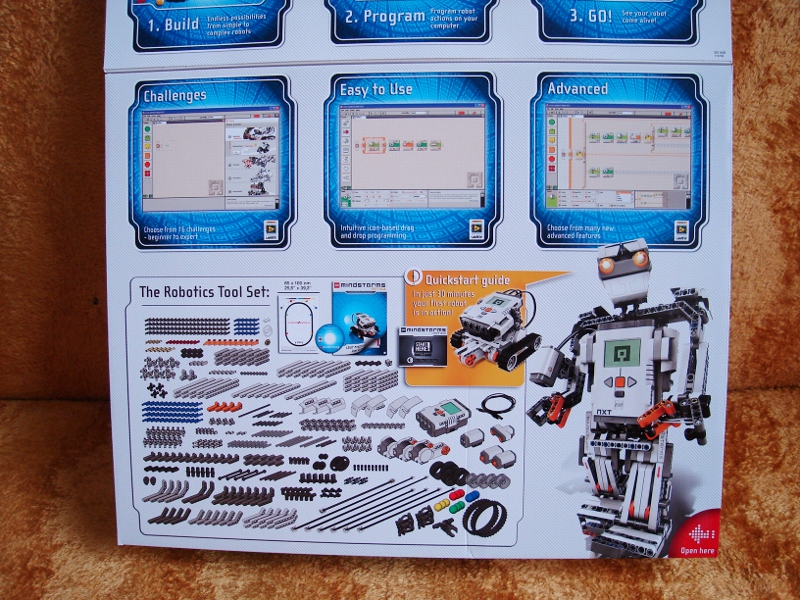
Tył:
Jeszcze raz widzimy tutaj modele alternatywne wraz z krótkim opisem, informacji o możliwości kontrolowania robota przez klawiaturę z komputera (sugeruje to obrazek), trochę o samym software (możliwość nagrywania własnych dźwięków/obrazów, które potem można wgrać do NXT), oraz reklamę społeczności Mindstorms.
Informacji przekazywanych tutaj jest dużo, jednak odpowiednie ich ułożenie sprawia, że całość jest dobrze przyswajalna.
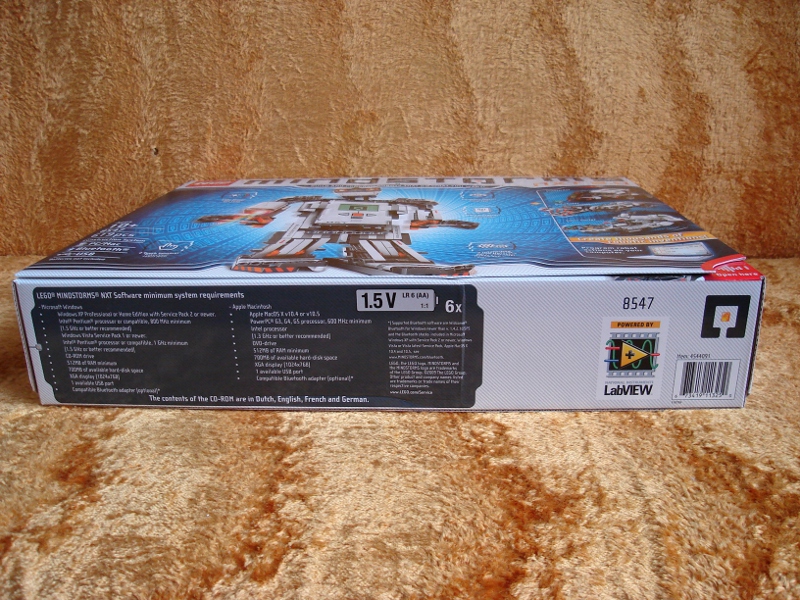
Boki:
na bokach umieszczono:
– informację o parametrach, jakie powinien spełniać nasz komputer
– informację o możliwości dołączenia do społeczności Lego Mindstorms
– zębatkę w skali 1:1
– grafikę pokazująca, że Alpha Rex mierzy 32 cm wysokości
– informacji, że możemy zbudować tylko 1 model z 4
– informację, z czego składa się zestaw
Pudełko ma pewną wyjątkową cechę – posiada bowiem otwierane wieczko, rodem ze starych, dobrych zestawów; szkoda tylko, że nie ma jakiejś przezroczystej folii czy czegoś, co po otwarciu pokazałoby klocki (zamiast tego otrzymujemy graficzny spis elementów).
Oprócz spisu elementów i opisu czujników, dostaniemy tutaj krótką reklamę – jak należy programować robota i jak wygląda standardowe oprogramowanie.
Zawartość


We wnętrzu znajdziemy:
– gąsienice (wrzucone luzem)
– 5 woreczków z częściami ( w tym jeden startowy)
– 2 drobne ulotki (informacje o tym, jak nie zanieczyszczać środowiska naturalnego itp)
– naklejki
– instrukcję
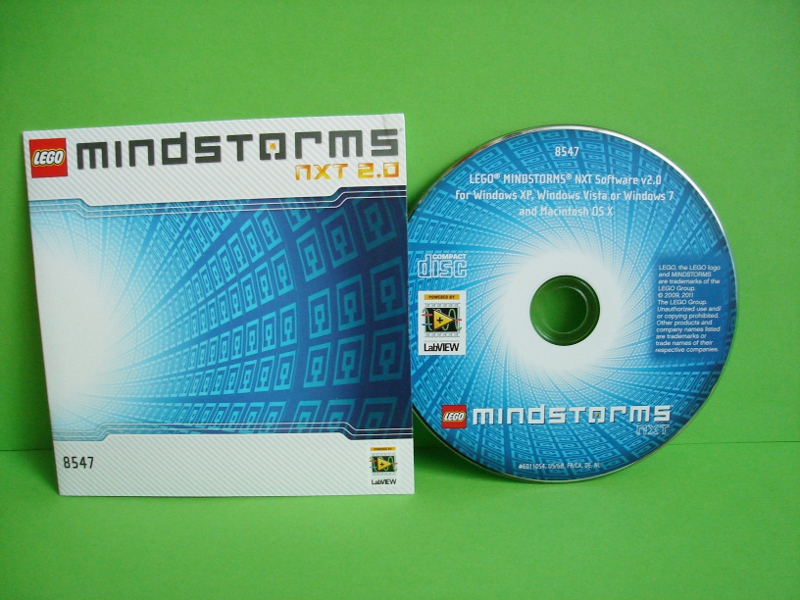
– płytę CD z oprogramowaniem
– małe pudełko z mikro-kontrolerem NXT
– większe pudełko z silnikami i czujnikami
– planszę do testowania robota
Plansza:



Na dole znajduje się napis „start”, gdzie też zazwyczaj uruchamiamy nasze roboty. Po lewej stronie odległość mierzona jest w centymetrach, a po prawej zaś w calach. Widoczne są też różne kolorowe fragmenty, które można wykorzystać dla czujnika kolorów.
O Software opowiem więcej w dołączonych filmikach. Dołączony tutaj program (NXT-G) polega na programowaniu bloczków. Wymagania, jakie musi spełniać komputer nie są jakieś olbrzymie.
Oczywiście warto wiedzieć, że istnieją również inne programy, umożliwiające oprogramowanie robota, jak np:
– robotC
– NXC (takie darmowe robotC, ale mniej wygodne)
– LabVIEW
(napisane na podstawie TEGO poradnika)
Instrukcja

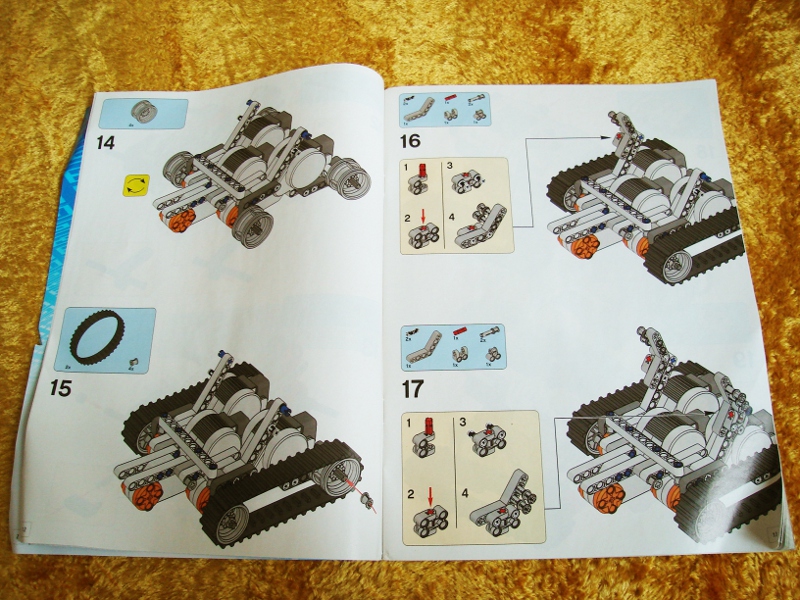
Kolorowa instrukcja składa się łącznie z 64 stron. Co prawda czarne elementy nie są otoczone białą obwódką, ale mi to nie przeszkadzało – wszystko jest czytelne, nie znalazłem błędów w budowie. Napisana jest w języku angielskim, ale w dzisiejszych czasach to nie powinno być problemem. Mogę jedynie narzekać na fakt, iż w momencie wyciągania, jej rogi były już pomięte – jak na zestaw w takiej cenie TLG powinno zatroszczyć się o tekturkę ochronną…
W skład instrukcji wchodzą:
– grafika początkowa (strona 1)
– przywitanie i spis treści (str 2-3)
– introdukcja (strona 4)
– instrukcja do zbudowania prostego robota (str 5-15, łącznie 20 kroków)
– opis technologii NXT (str 16-45)
– opis Software (46 – 58)
– użyteczne informacje (59 – 64) wraz ze spisem elementów (63)
Instrukcja w wersji polskiej (dodana przez sprzedającego):

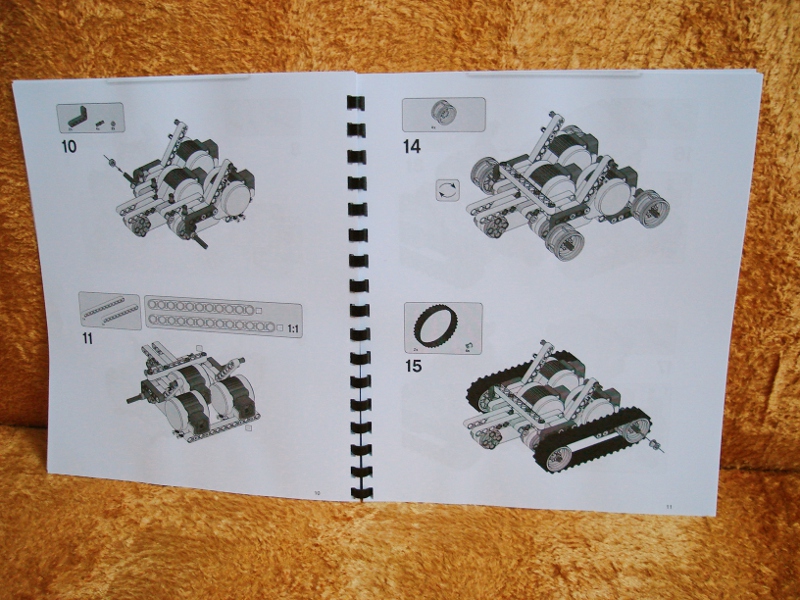

Jest ona w pełni czytelna. Niestety brakuje niektórych kroków (12 i 13) w instrukcji modelu podstawowego – co jednak nie jest problemem – wystarczy bowiem sięgnąć do anglojęzycznej wersji lub uruchomić oprogramowanie dodane na płycie.
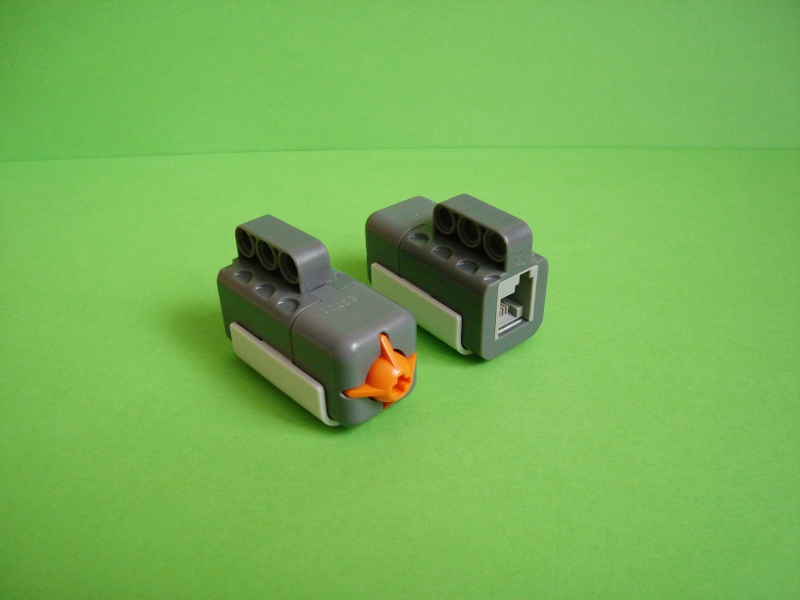
Czujniki
NXT:


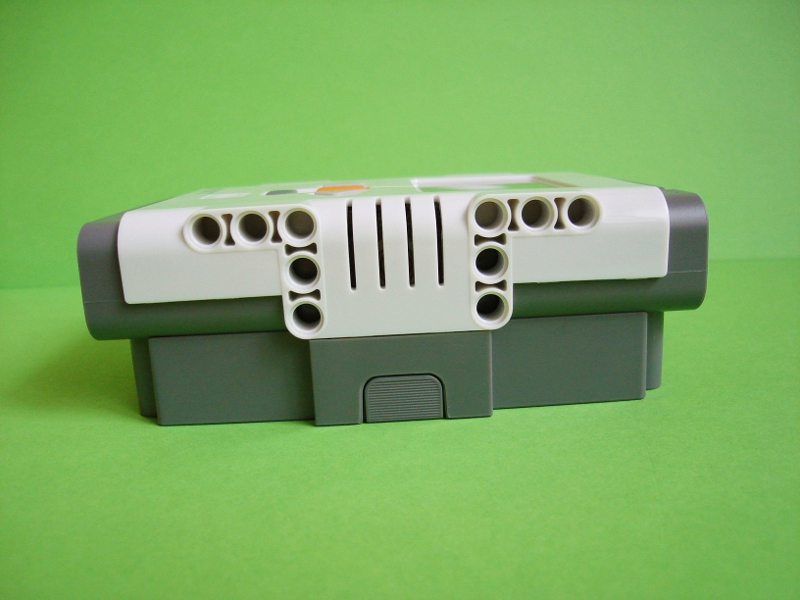

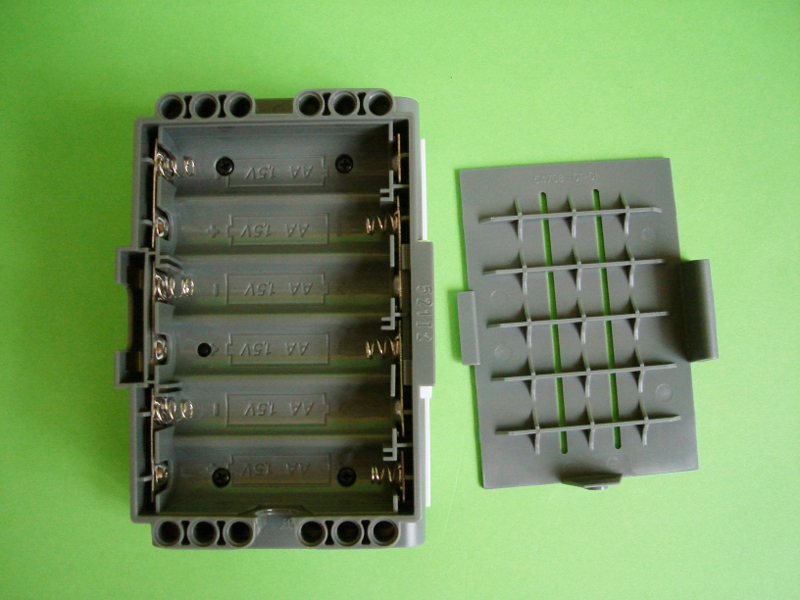
Główny mikro-kontroler NXT został zapakowany do oddzielnego pudełka. Karteczki, widoczne na zdjęciu zawierają informację o bateriach oraz środowisku naturalnym. Nie zabrakło też oddzielnej instrukcji pokazującej, w jaki sposób włożyć baterie.
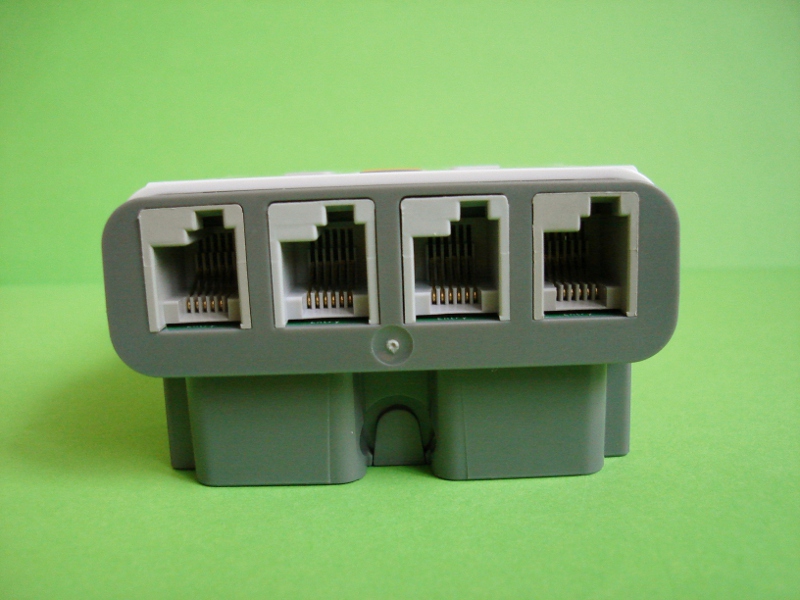
Czym jest zatem NXT? Mówiąc najprościej – sercem całego robota, bez którego czujniki to tylko klocki; to tutaj wgrywamy program (poprzez dodany kabel USB lub Bluetootha), stąd wychodzą rozkazy i tu zapisywane są dane pomiarowe. Można tu też przetestować działanie czujników, czy wszystko działa, a także zrobić prosty program (bez użycia komputera). Niemniej pamięć jest tu dość ograniczona, dlatego co jakiś czas trzeba kasować programy, zastępując je nowymi, zgodnie z naszymi potrzebami.
NXT posiada porty – wejściowe i wyjściowe (ich opis zamieściłem na początku recenzji). Jeżeli podłączymy czujnik do złego portu, to nic się nie stanie/wybuchnie/spali się; wystarczy odczepić kabel ze złego portu i wsadzić do dobrego.
Czujniki i silniki:

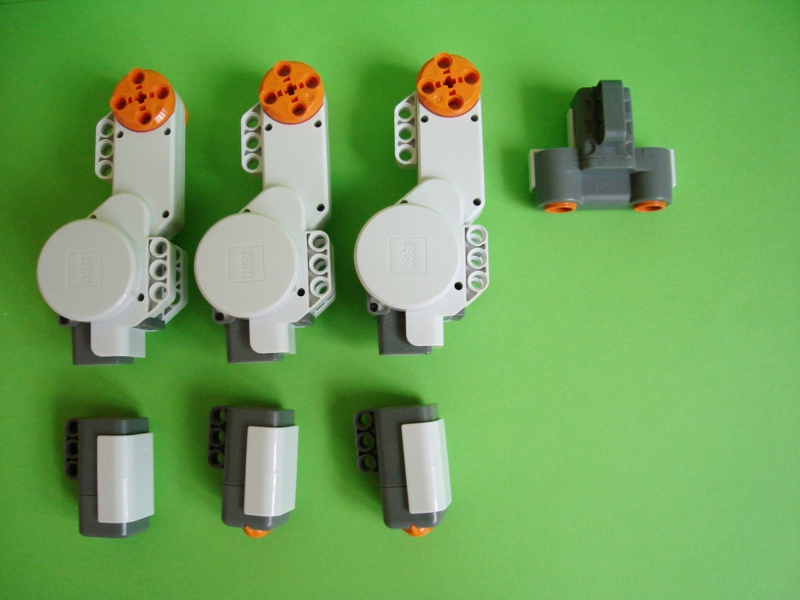



Patrząc na główne zdjęcie widzimy:
– czujnik ultradźwiękowy (góra po lewej)
– czujnik kolorów (niżej)
– 2 czujniki dotykowe
– 3 serwomotory (po prawej stronie)
– kabel usb (na dole po lewej)
– kable do połączenia czujników/silników z NXT (1×20 cm, 4×35 cm, 2×50 cm)
Testowanie poszczególnych czujników przedstawiłem w filmie poniżej:
Klocki

Jak widać, tylko gąsienice nie są zapakowane do żadnego woreczka.
Woreczek startowy:



Wykorzystując klocki z tego woreczka + gąsienice, jesteśmy w stanie zbudować bazę pod najprostszego robota.
Woreczek z drobnicą:


Woreczek z większymi częściami – część 1:


Woreczek z większymi częściami – część 2:


Woreczek z największymi częściami:



W tekturowym opakowaniu znajdują się gumki. Klocków jest tak dużo, że musiałem wykonać dodatkowe zdjęcie.
Jeśli kogoś interesuje, jak wygląda zestaw z dodatkowymi częściami Mindstorms oferowany przez TT, zapraszam do filmiku:
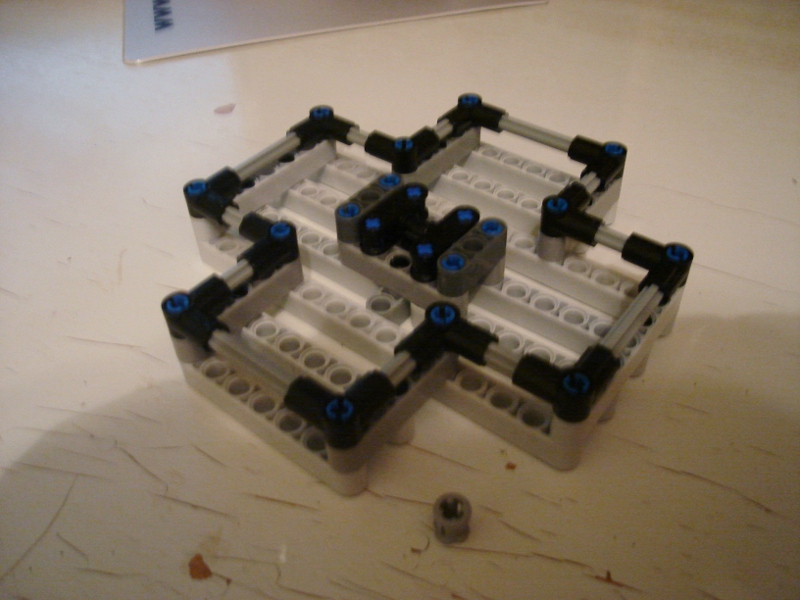
Model Bazowy



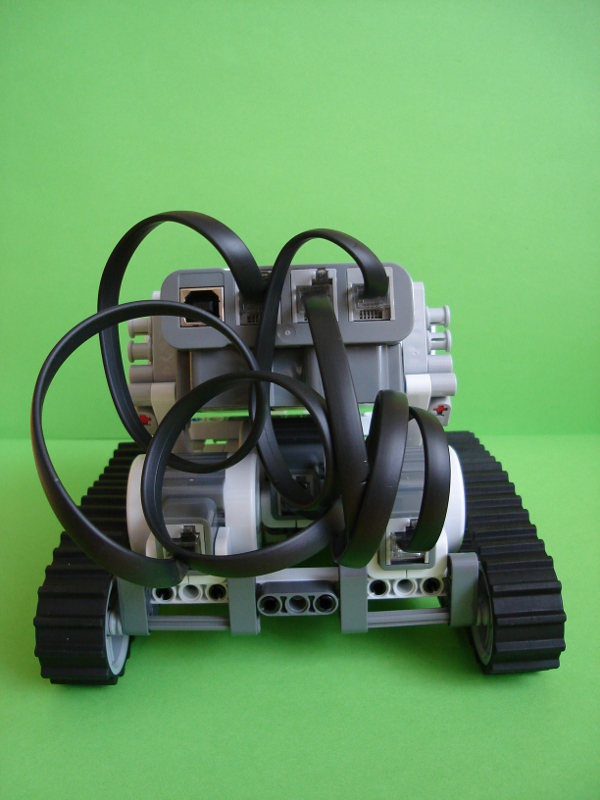

Robot ten jest najprostszą konstrukcją, jaką możemy zbudować, a jednocześnie podstawą do budowy Shooterbota. Instrukcje do jego budowy znajdziemy zarówno w książeczce, jak również w dołączonym oprogramowaniu.
O tym, jak wygląda program w kilku zdaniach oraz jak wgrać prosty program, dowiecie się oglądając ten filmik:
Tutaj zaś spróbujemy stworzyć własny, trochę ciekawszy program:
Shooterbot 
Ponieważ początkowym krokiem było stworzenie bazowego robota (krok 1; robot ten jest identyczny jak ten z poprzedniego podpunktu), którego zbudowałem już z instrukcji, pozwoliłem sobie od razu przejść dalej.
krok 2 – czujnik kolorów:

Oprogramowanie tego robota polega na tym, że robot zakręca w momencie, kiedy jego czujnik zauważy czerwoną linię.
krok 3 – strzelanie:

Tutaj czujnik kolorów służy do sygnalizowania ruchu/wycofania/ataku. Dodatkowo co jakiś czas wystrzeliwane są śmiercionośne kule zagłady.
krok 4 – czujnik ultradźwiękowy:


Robot kręci się w kółko. Kiedy zauważy, że coś zbliżyło się za blisko, sygnalizuje, że pojawił się obiekt. Jeśli obiekt ucieknie, robot kręci się dalej; w przeciwnym wypadku dioda zmienia się na kolor czerwony i robot strzela do obiektu.
Shooterbota w akcji zobaczycie, oglądając ten filmik:
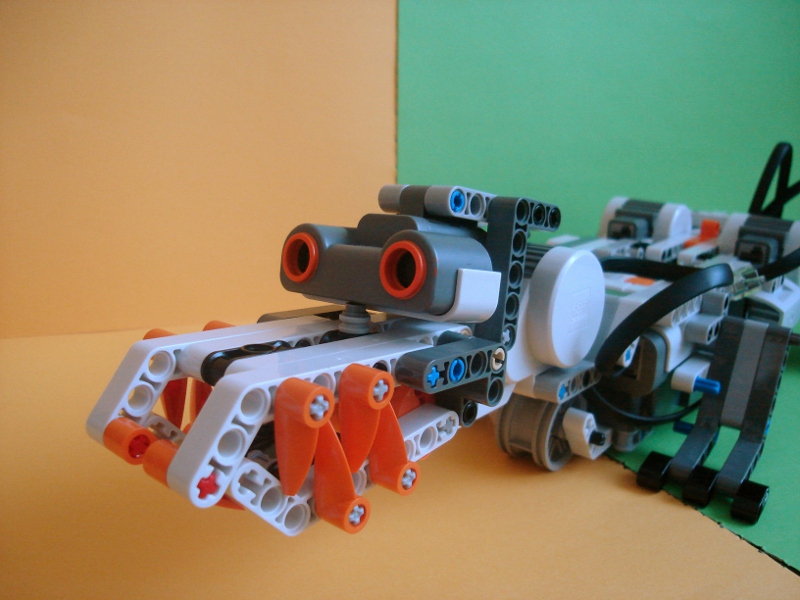
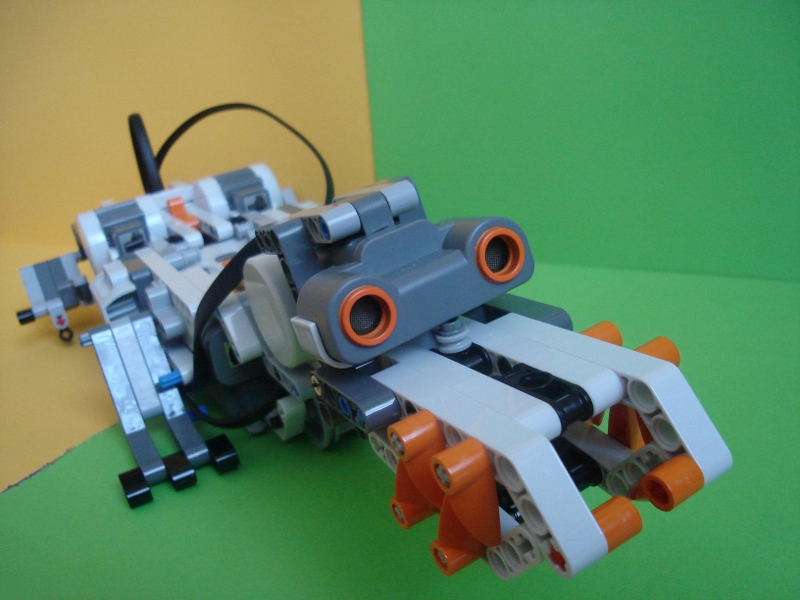
Robogator 
Krok 1 – szczęki:


Tutaj tworzymy szczęki i piszemy do nich prosty programik. Szczęki otwierają się i zamykają.
Krok 2 – oczy:

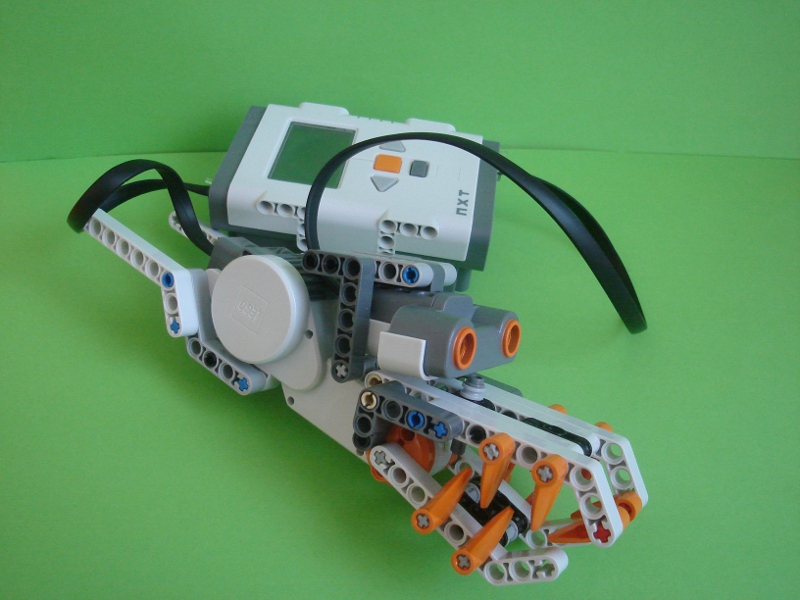

Teraz szczęki działają tylko, gdy robot zauważy obiekt, który jest zbyt blisko.
Krok 3 – ciało:



Nasz aligator może się teraz poruszać – częściowo dzięki deskorolce, umieszczonej na brzuchu stwora.
Program można przesłać poprzez kabel USB. Gniazdo znajdziemy w pobliżu głowy stwora:
Krok 4 – ogon:



W tym kroku tworzymy ogon robota.
Niestety nie obejdzie się bez drobnej uwagi – jeden z kabli jest za blisko koła zmniejszającego tarcie Robogatora z podłożem, co może wpłynąć nieco negatywnie na ruch stwora.
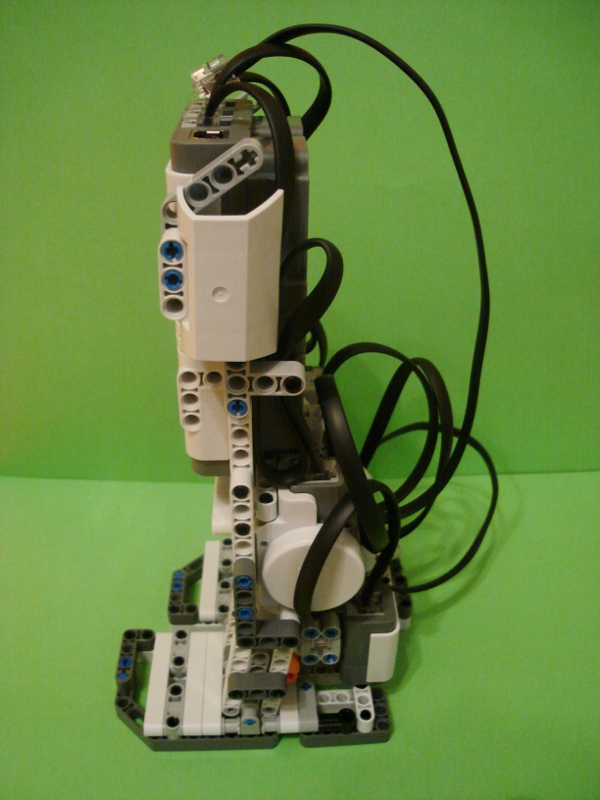
Color Sorter
Color Sorter ma 3 poziom zaawansowania. I coś w tym jest – pamiętam, że dość długo go budowałem…
Kolorowe kule są identyczne jak te z serii Bionicle – różnica tkwi jedynie w innym ubarwieniu…
Krok 1 – sortownica:


Sortownica wybiera jedną kulę z wszystkich dostępnych i wrzuca do prymitywnego pojemnika.
Krok 2 – czujnik kolorów:

Tutaj oprócz wrzucania pojedynczych kul, system odczytuje ich barwę. Niestety, kule mogą się przyblokować – dlatego radziłbym podnieść czujnik nieco do góry.
Krok 3 – platforma do sortowania:

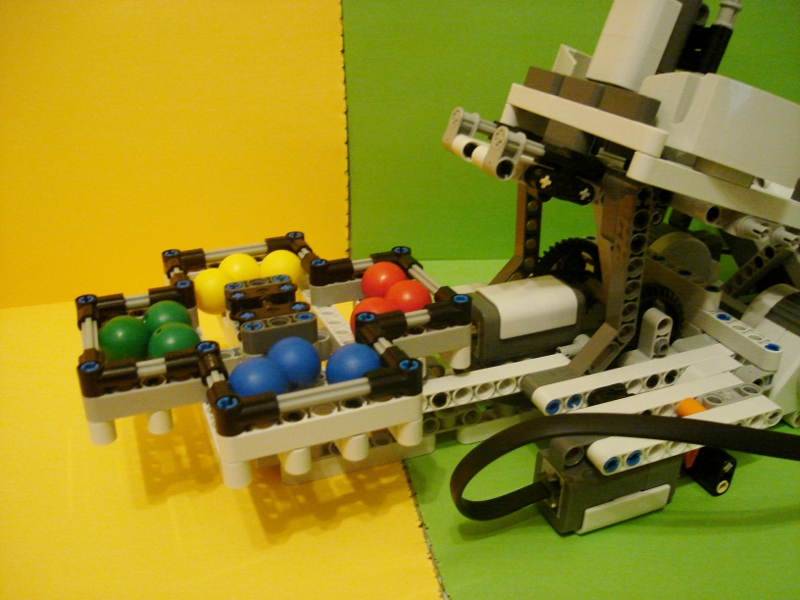
Po odczytaniu koloru platforma się obraca i kula wrzucana jest do odpowiedniej przedziałki (w każdej przedziałce znajdują się kule tego samego koloru).
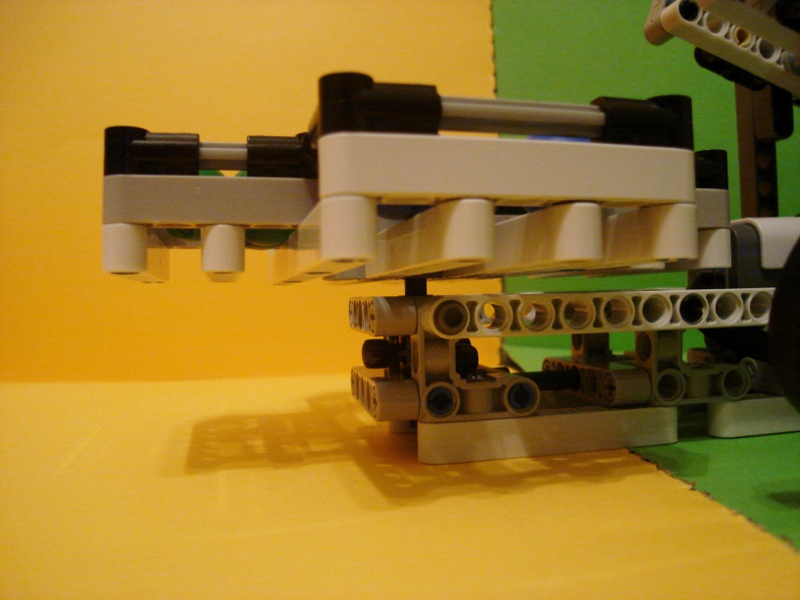
Odczepiona platforma wygląda tak:
Drobna uwaga – obracająca się platforma nieco haruje o kabel. Można rozwiązać ten problem, podwyższając ją nieco. No i wkurzający jest fakt, że przed kolejnym użyciem musimy odpowiednio nastrajać silnik odpowiedzialny za ruch platformy – a po nastrojeniu obrót i tak nie jest idealny (korzystamy z programów bazujących na instrukcji).
Krok 4 – katapulta:


Podobnie, jak w przypadku platformy, tutaj również występuje problem z kablem – tym razem z tym podłączonym do silnika katapulty (czasem się o nią zahacza i wówczas jest brak możliwości obrotu). Poza tym musimy pamiętać o nastrojeniu silnika (podobne jak we wcześniejszym kroku).
Gotowy model ustawiamy tak, aby ość obrotu katapulty była idealnie w centrum planszy testowej.
Działanie modeli możemy zobaczyć, oglądając filmik:
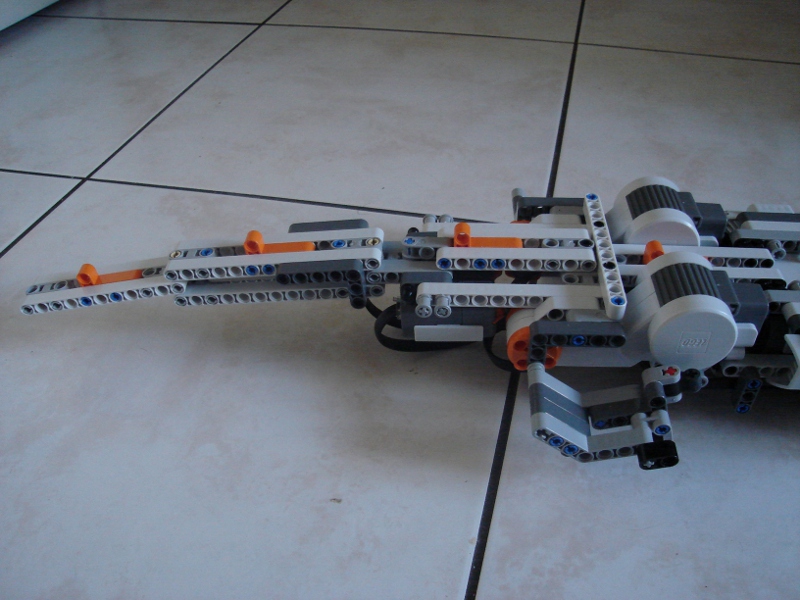
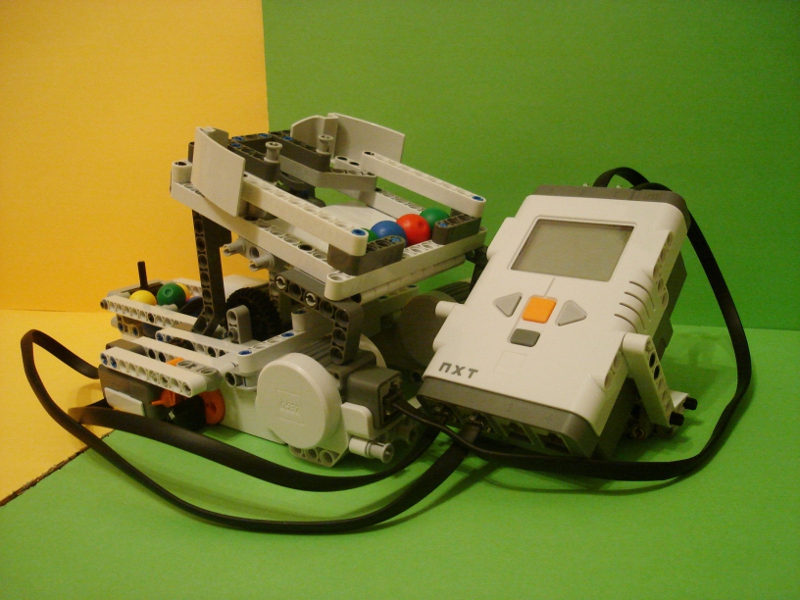
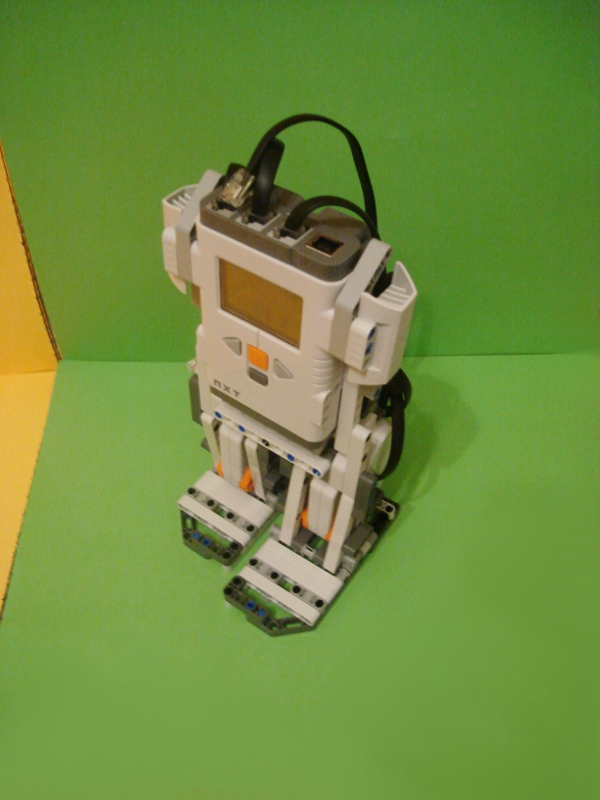
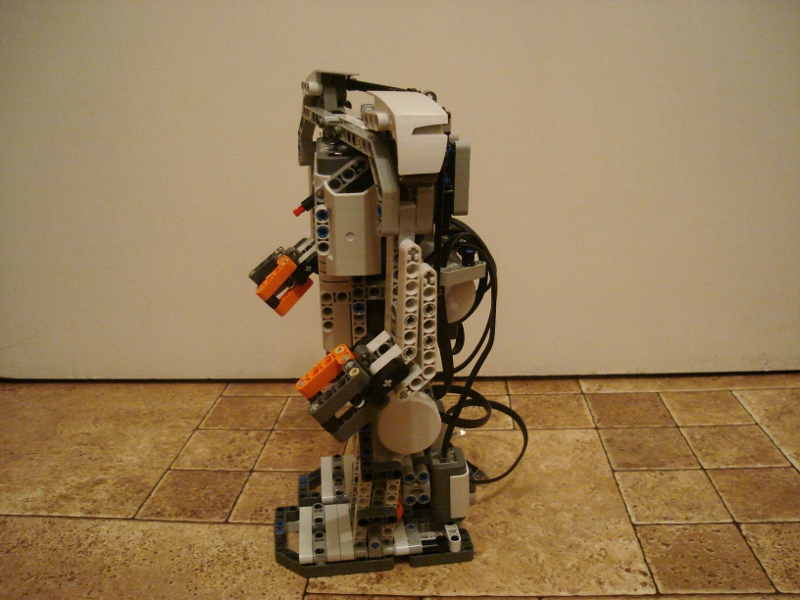
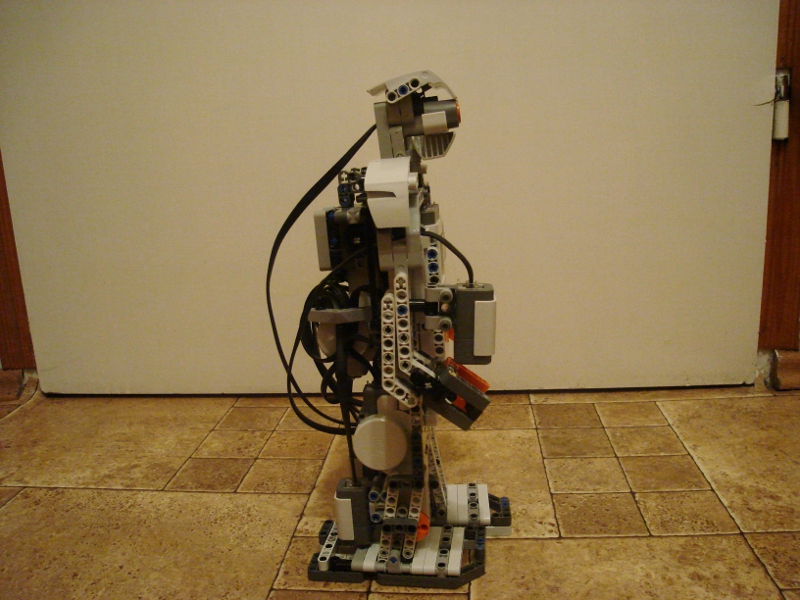
Alpha Rex
Najwyższy czas zbudować główny model – Alpha Rexa, mierzącego 32 cm wzrostu! Podobnie jak sortownik kolorów, Alpha jest najbardziej zaawansowanym modelem – z tą jednak różnicą, że dochodzi również bardziej czasochłonne programowanie.
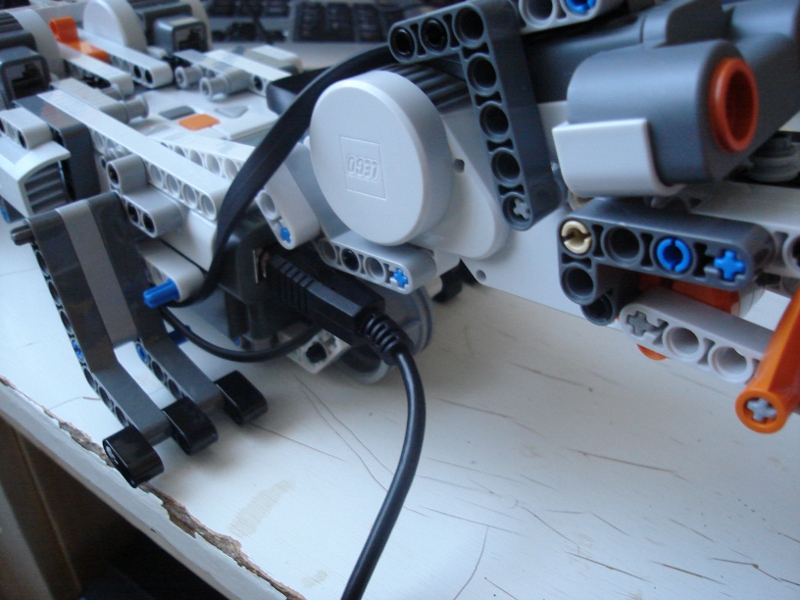
Krok 1 – nogi:


Widząc, jak poruszają się nogi, poczułem się trochę jak ojciec oglądający pierwsze kroki swojego dziecka :D No, może trochę przesadziłem, ale uważam, że efekt jest zadowalający.
Niestety przeszkadza tutaj plątanina kabli. Instrukcja każe nam kable zwijać, ja natomiast -mając niemiłe doświadczenie ze zwijaniem kabla od ładowarki do laptopa – radziłbym być ostrożny (żeby przypadkiem we wnętrzu kabla nie zerwało się jakieś połączenie).
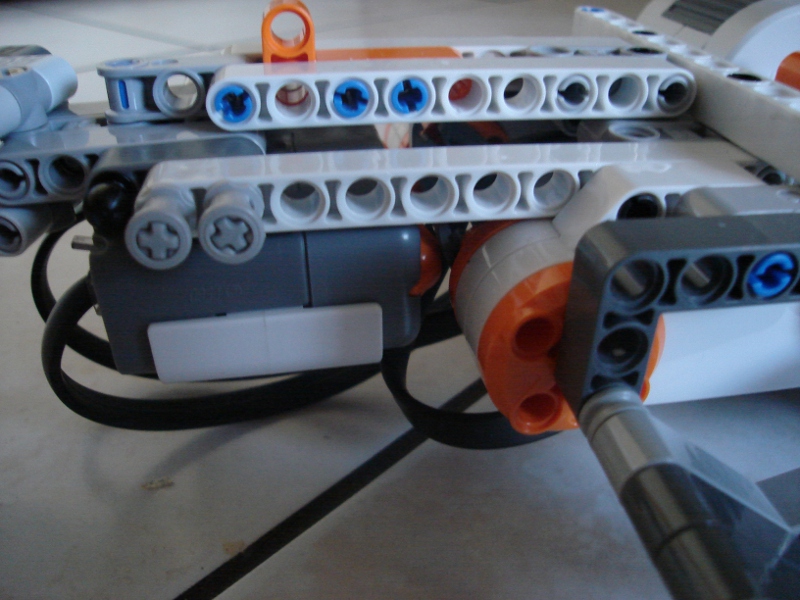
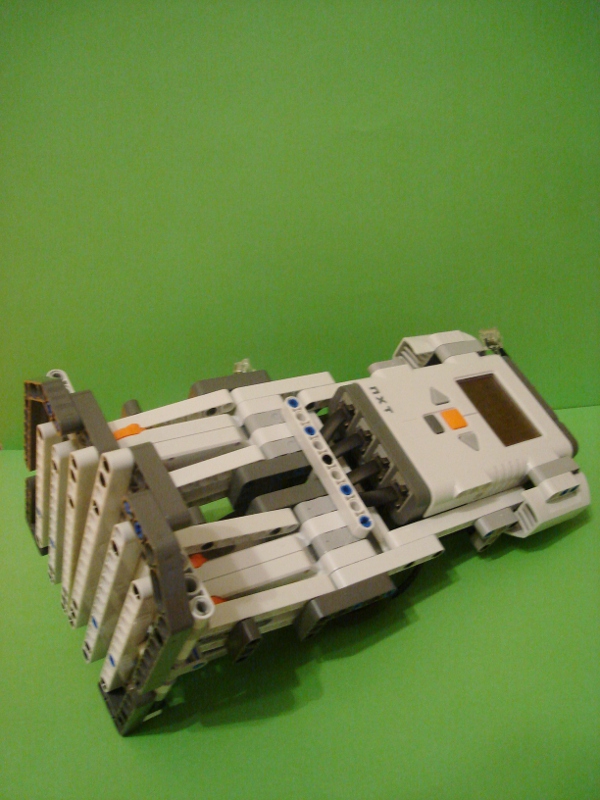
Krok 2 – ramiona:

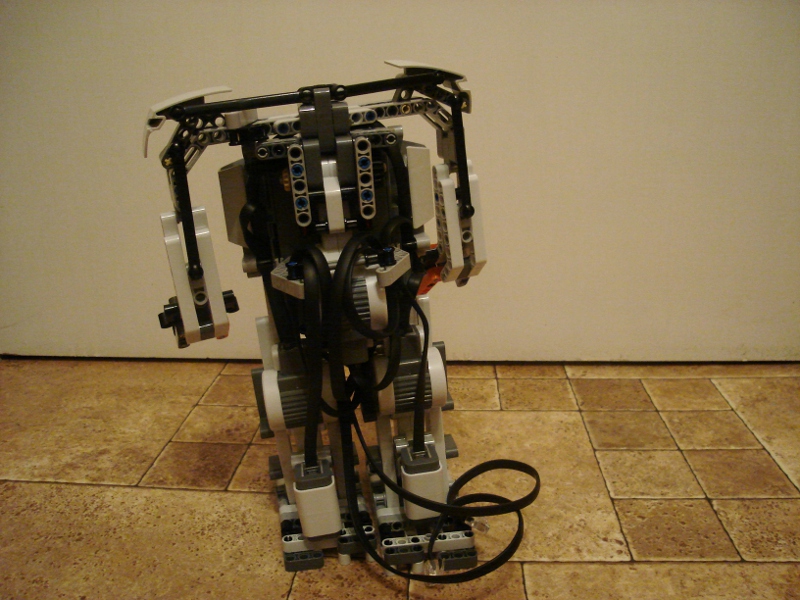
Ramiona pracują nieźle, aczkolwiek mechanizm przeniesienia obrotu silnika na ruch ramion mógłby być lepszy – w tej chwili może się zablokować (częściowo winne są kable, a częściowo klocek przenoszący napęd). Poza tym dochodzi problem ruchu ramion – wypadałoby je nieco podnieść, żeby nie dotykały kabli, podłączonych do portów A, B, C …
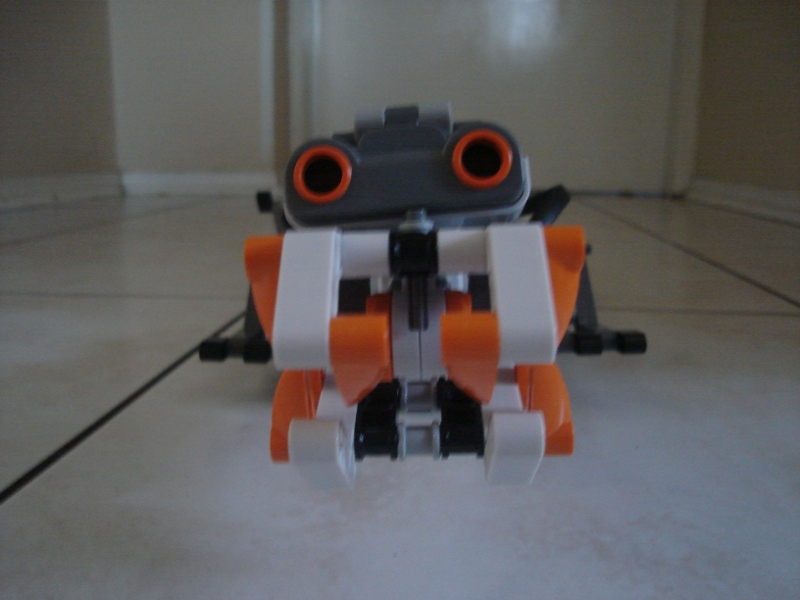
Krok 3 – głowa:


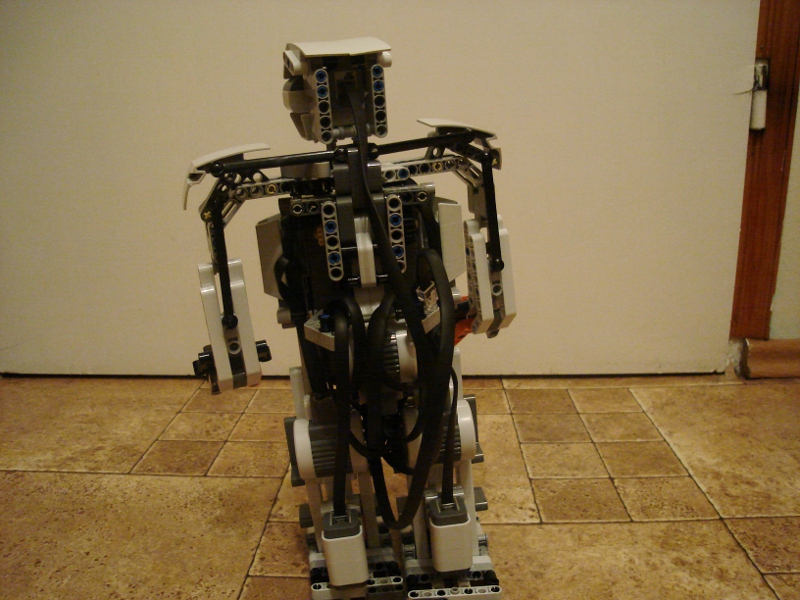
Nasz Alpha Rex zaczyna iść do przodu (gdy zauważy obiekt). Gdy ponownie go zauważy, zawraca.
Aby wgrać tutaj program, trzeba zdemontować głowę robota.
Krok 4 – czujnik kolorów:

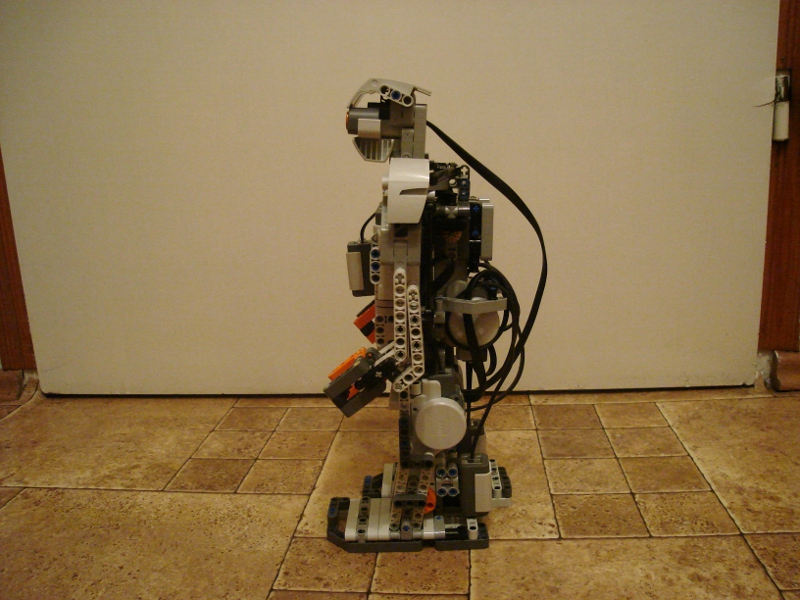
I oto gotowy Alpha Rex. Gdy robot zauważy obiekt, podchodzi do niego, zatrzymuje się i prosi, aby dać mu zieloną kulę. jeżeli kula będzie w innym kolorze, robot mówi jej nazwę i ją wyrzuca; w przeciwnym wypadku robi taniec zwycięstwa… po którym znowu wyrzuca kulkę :P
Niestety ograniczona pamięć NXT daje o sobie znać – żeby zapisać wszystkie programy z Alpha Rexem, należy wpierw usunąć wszystkie dotychczasowe programy.
Dodatek:

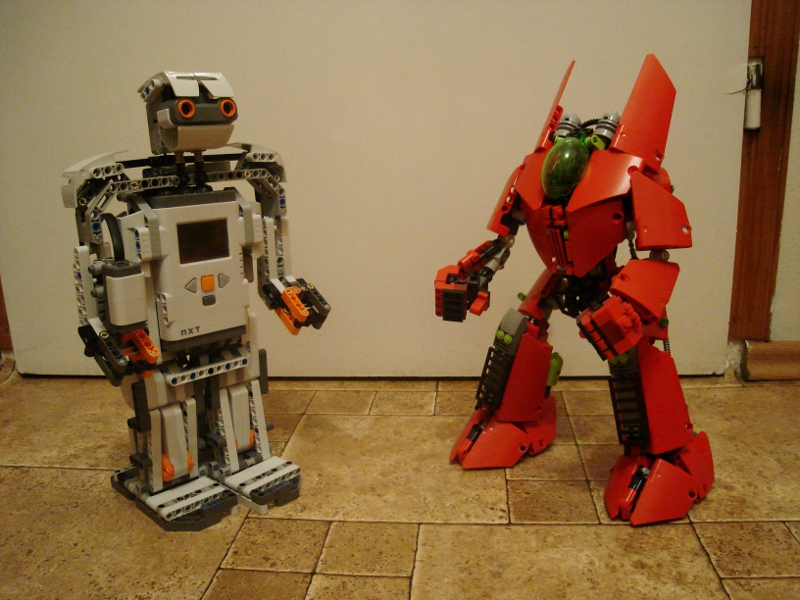

Porównanie wielkości Alphy z pewnym WIPowym mechem…
Działanie możecie zobaczyć tutaj:
Podsumowanie
8547 jest bardzo drogim zestawem, jednak czasami może trafić się nieco bardziej korzystna oferta kupna. Zresztą powiedzmy sobie szczerze – ruchome silniki, czujniki czy wreszcie cały mikro-kontroler – to wszystko kosztuje… niemniej miło widzieć, że wszystko działa jak należy (problem leży tylko w napisaniu odpowiedniego programu).
W recenzji skupiłem się jedynie na bloczkowym Software, dołączonym do zestawu – istnieją jednak inne programy i związane z nimi języki programowania, które umożliwiają wykorzystanie w wydajniejszy sposób naszego NXT, niemniej jest to temat na osobny artykuł.
Od samego początku chciałem zbudować Alpha Rexa, ale zacząłem od modeli alternatywnych – ku mojemu zaskoczeniu okazały się one bardzo ciekawe i nie żałuję, że je skonstruowałem. Niestety, do większości z nich znalazłbym jakieś zastrzeżenia w konstrukcji. No ale klocki są po to, żeby móc poprawić niedociągnięcia…
Modele alternatywne nie są już tak popularne jak niegdyś, jednakże ten zestaw jest wyjątkiem: oprócz 4 modeli, które możemy zbudować z instrukcji dołączonej do oprogramowania, możemy ze strony Mindstorms pobrać masę dodatkowych projektów (instrukcji, gotowych programów), stworzonych tylko z tego zestawu.
Na pochwałę zasługuje czytelna instrukcja (szkoda jedynie, że nie zabezpieczono jej dodatkową tekturą). Początkowo nie rozumiałem, dlaczego w głównej książeczce znajduje się tylko instrukcja potrzebna do budowy startowego modelu – zostałem oświecony w momencie, kiedy zobaczyłem, ile stron instrukcji miałyby poszczególne modele (Shooterbot: 22 + 4 + 20 + 2 (łącznie 48), Robogator: 20 + 4 + 65 + 17 (106), Color Sorter: 102 + 6 + 18 + 22 (148), Alpha Rex: 73 + 51+ 13 + 2 (139); łącznie wszystkich stron 441). Do tego dodajcie jeszcze strony pokazujące, w jaki sposób zaprogramować poszczególne kroki.
Taka ponad 400-stronicowa instrukcja byłaby niewygodna i wpłynęłaby negatywnie na cenę zestawu.
Czy Mindstorms nadaje się jako zabawka dla dziecka? Nie mówię nie, ale dobrze by było, gdyby jakiś dorosły czuwał w pogotowiu – na wypadek, gdyby pociecha miała jakieś problemy i w wyniku czegoś w rodzaju dzikiej furii nie zniszczyła jakiegoś kabla.
Mindstorms nadaje się również do programowania robotów dla uczelnianych celów i bardzo często możemy je spotkać na dniach otwartych studiów technicznych.
Ocena
++ aż 4 różne modele + cała masa na oficjalnej stronie mindstorms
+ solidne silniki
+ podstawowe czujniki
+ każdy model ma specyficzne funkcje
+ możliwość tworzenia własnych programów i wrzucanie ich do NXT
+ niskie wymagania sprzętowe
+ możliwość programowania w różnych językach (nie tylko poprzez dołączony software)
+ czytelna i przyswajalna instrukcja
+ prosty interfejs NXT
+ chodzący robot (Alpha Rex) :D
+++ to ŻYJE!!!
+/- naklejki
+/- pomijając elektronikę – dość przeciętne klocki (ale wystarczają w zupełności do budowy różnych ciekawych modeli)
– brak tekturki ochronnej do instrukcji
– trzeba dokupić sobie czujniki do odczytywania głosu/temperatury
– 4 porty wejściowe i 4 porty wyjściowe to może się okazać trochę mało
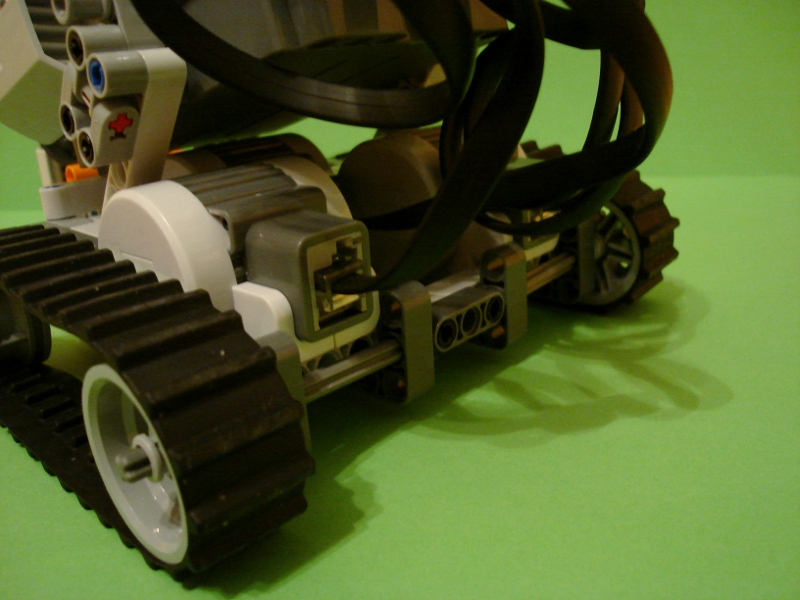
– trzeba uważać aby nie uszkodzić kabli; te kable wszędzie dyndają!
– wysoka cena

Witam, fajny pomysł na bloga. :-D
Szczególnie zainteresował mnie sorter kolorów. posiadasz do niego instrukcję i opis w jaki sposób napisać oprogramowanie? Jeżeli możesz to podeślij proszę na maila
Hm…. byłem pewien, że linki do instrukcji działają. Okazuje się, że działa link, ale tylko do dodatkowych modeli (jest ich 24) – z niewiadomego mi powodu, link do modeli głównych nie działa (nie pobrałem go).
Znalazłem za to inny link:
http://www.eurobricks.com/forum/index.php?/forums/topic/54141-alpha-rex-20/
(3-ci od góry komentarz użytkownika DLuders). Może to coś pomoże.
Niestety nie mam obecnie na dysku żadnego PDF-a z instrukcjami do modeli głównych. To dziwne, że LEGO nie udostępniło oficjalnie instrukcji do modeli głównych 8547 …
Dzięki za pomoc. Instrukcja jest również dostępna w programie NXT-G software.
Jednak teraz mam wiekszy problem ponieważ program który mam nie działa poprawnie i albo tacka obraca się cały czas i nie zatrzymuje się w odpowiednim miejscu, albo wyrzuca kulki jak popadnie nawet podczas obrotu tacki… masz może jakieś rady w tym temacie?
Pozdrawiam
Dybi
Hmm … jeśli dobrze rozumiem – sortera zrobiłeś według instrukcji umieszczonej w oprogramowaniu i również wykorzystałeś z niej instrukcję do napisania programu?
Dawno nie bawiłem się NXT, ale w tej chwili przychodzą mi do głowy cztery rozwiązania:
1) przeanalizuj bloczek po bloczku, czy nie masz jakiegoś babola w kodzie
2) sprawdź, czy złożony robot gdzieś się nie blokuje
3) sprawdź, czy w sieci nie ma nowszych sterowników
4) spróbuj podmienić silnik na inny
Pingback: Paczka z Mindstorms NXT i dodatkowymi częściami. Opis pudełka zestawu. - TeachersConnect